Поняття віртуальної базової станції (Virtual Reference Station) засноване на мережі базових GNSS -станций, безперервно сполучених за допомогою каналів передачі даних з центром управління. Комп'ютер в центрі управління безперервно збирає інформацію від усіх приймачів, і створює базу цих регіональних поправок. Ці поправки використовуються для створення віртуальної базової станції, розташованої всього в декількох метрах від місця, де розташований рухливий приймач (ровер). GNSS -ровер інтерпретує і використовує дані VRS начебто вони поступили від реальної базової станції. В результаті підвищується точність і продуктивність RTK методу.
Реалізація ідеї VRS у функціональне системне рішення по наступних принципами. Спершу потрібно декілька базових станцій (не менше три), які підключені до мережевого сервера через деякі лінії зв'язку.
GNSS -ровер посилає його зразкове положення в центр управління, з використанням каналу передачі даних мобільного телефону. Центр управління приймає дані про положення ровера, і відповідає шляхом відправки поправок, що коригують, на ровер. Як тільки вони отримані, ровер обчислює своє положення у високій якості і оновлює координати точки. А потім знову направляє дані про своє місце розташування в центр управління.
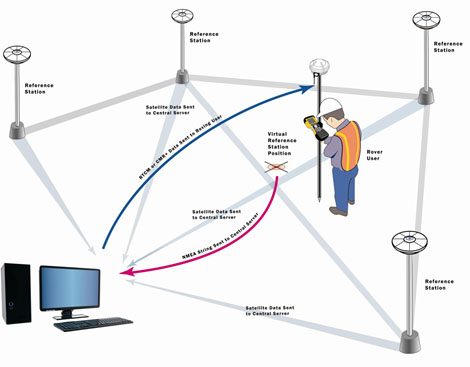
Мережевий сервер тепер обчислюватиме нові поправки так, щоб вони сприймалися ровером як поправки від базової станції, що знаходиться поруч. І посилає їх назад на канал передачі даних мобільного телефону. Цей метод створення початкових даних базової станції і дає концепції її назва "The Virtual Reference Station". За допомогою цього методу, можна виконатидуже поліпшену RTK зйомку.
Основним призначенням VRS є зменшення довжини базової лінії між мобільним приймачем і базовою станцією для того, щоб ефективно видалити просторово корельовані помилки з використанням диференціальної обробки, і включити поправки, отримані від мережі базових станцій.
Оскільки приймач користувача не може, за визначенням, відрізнити реальну базову станцію і VRS, відстань між VRS і користувачем має бути сумірно з рівнем поправок, присутніх в даних VRS. Що дозволяє приймачу використовувати свої алгоритми обробки даних, які змінюються залежно від довжини базової лінії до базової станції.
Щоб проілюструвати це, давайте розглянемо простий приклад. Припустимо, призначений для користувача приймач виконує L1 обробку базових ліній до, скажімо, 8 кілометрів і двочастотні (L1 / L2) комбінації для довших базових ліній.
Тепер уявіть, що якщо поправки в даних VRS були схожі на 20-кілометрову базову лінію, але положення VRS було визначене всього в 2 кілометрах від користувача. В цьому випадку приймач користувача намагатиметься використовувати L1 обробку, але рівень поправок в даних, майже напевно не дозволить отримати коректні результати з використанням цього підходу.
З цього прикладу ми бачимо, що VRS потребує фізичної мережі GNSS -станций навколо області вимірів, з як мінімум трьома базовими станціями, щоб дістати можливість моделювання поправок. При цьому більша кількість базових станцій і поліпшена геометрія мережі забезпечують точніше моделювання поправок.
Концепція VRS дозволяє використовувати менш щільну мережу GNSS -станций без погіршення точності. В результаті максимальна відстань між ровером і найближчою базовою станцією може бути збільшена в порівнянні з типовими 10 ~ 15 кілометрами без погіршення точності. Ця технологія значно спрощує роботу геодезистів в умовах складного рельєфу місцевості, а так само, дозволяє створити мережу поправок на велику територію і відійти від необхідності вступу різних місцевих систем координат з діленням їх на зони.
Використані матеріали:
[1] Герберт L., и U. Vollath и X. Chen, "Виртуальные Справочные Станции против Широковещательных Решений в Сетевом RTK -Advantages и Ограничения", бумага присутствовал на конференции GNSS 2003, 2003 апреля, Грац, Австрия
[2] Hu, G. R., и H. S. Khoo, P. C. Goh, и C. I. Закон, "Развитие и Оценка Виртуальных Справочных Станций GPS для RTK, Помещающий", Журнал Геодезии, Т. 77, p. 292-302, 2003
[3] Retscher, G., Выполнение "Точности Виртуального, Журнала Сетей" Справочной Станции (СТАБИЛОВОЛЬТ) Глобальных Систем Местоопределения, Т. 1, No.1:40- 47, 2002
[4] Ван Cranenbroeck J., и V., на котором Lui и C. Rizos, "Окончательный Прогресс в GNSS RTK Контролирующая Точность", присутствовал Региональная Конференция 7th НАРЯДА (Международная Федерация Инспекторов), Пространственные Данные, Обслуживающие Людей: Сухопутное Управление и окружающая Среда, - Строительный Вместимость, 19-22 2009 октября, Ханой, Вьетнам
